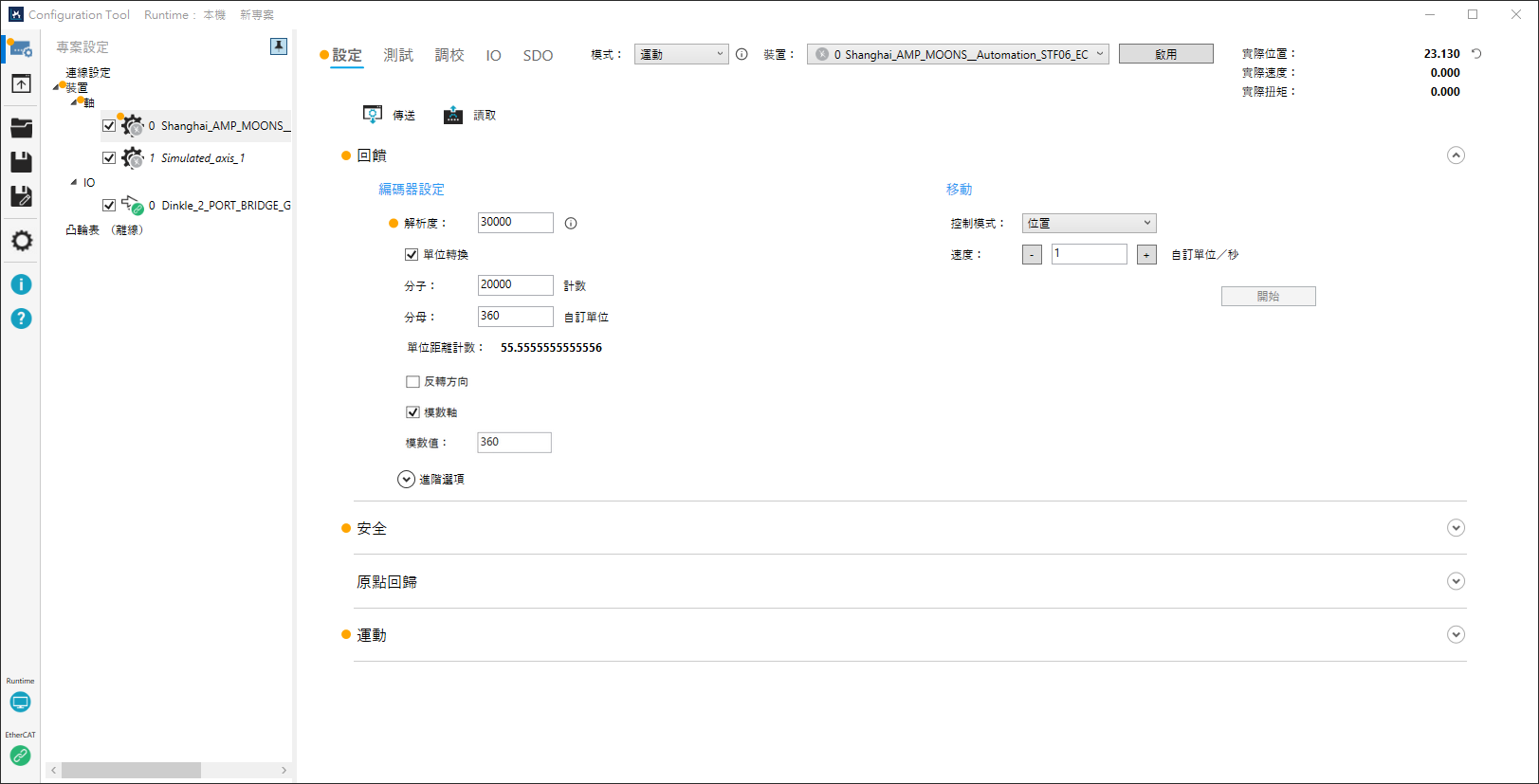
在此页面中,可将伺服驱动器的单位转换为您的使用单位、反转轴的方向、限制轴的移动范围(极限开关)、设定轴的原点开关、和设定轴的最大和最小加速度、减速度与加加速度,若您的伺服驱动器在数位输入中提供极限开关状态,则在数位输入启用时将自动使用该状态。
于专案设定窗格点选一个轴,然后点选设定窗格中的「设定」页签以开启此页。
传送与读取
「传送」与「读取」是相当弹性的功能按键,您可使用它们对 KINGSTAR 子系统的值进行读写。若您已建立一个新的设定工具专案,在硬体连接后,设定工具即自动将一系列设定写入 KINGSTAR 子系统以供轴使用,而这些由 KINGSTAR 配置的设定适用于大多数的轴,有了这些设定后轴即可正确移动(非完全精准)。设定工具运作时会持续对显示在设定工具介面上与储存于子系统中的值进行比较,若您或其他应用程式改变了某些项目值,改变的项目将会被标注。欲将改变的值写入子系统,需点选「传送」,否则新值将不会被写入;若已在某些栏位改变了值,但欲读取在子系统中原来的值,可点选「读取」。
当介面上显示的值与储存于子系统中的值不同时,「传送」与「读取」按键才会被启用,点击该按键后,设定工具将提醒您设定将会变更。
传送:将新值套用到 KINGSTAR 子系统,点击「传送」以后,设定工具将提醒您设定将改变。
读取:读取 KINGSTAR 子系统的值,点击「读取」以后,设定工具将提醒您所读取的值将会覆写栏位中的值。
注意:若开启设定工具专案,在硬体连接后,设定工具将使用先前储存的设定。
注意:设定页面中的「传送」与「读取」按键以及测试与调校页面都是连动的,意旨若在任一页面改变了与轴相关的某些设定,相关的改变将在其他页面被标注。
回馈提供单位转换与反转方向,可使用基本运动以测试机器的回馈是否适用于新的设定值。
编码器设定若编码器设定变更,设定工具将会提醒更改原点回归、运动及 PID 设定的值。 解析度:连线轴的解析度。
单位转换:启用轴使用真实世界单位,改变单位将影响位置与速度。当取消勾选此功能,分子与分母将无法设定。 分子:将驱动器单位转换为使用者单位。例如,若装置为编码器,通常分子是编码器的解析度。 分母:将驱动器单位转换为使用者单位。例如,若使用度数,因一旋转为 360 度,则值将为 360。 单位距离计数:一个使用者单位的编码器计数。 反转方向:反转轴的移动方向。 模数轴:选取以启用模数轴。接著,在「模数值」输入框中输入一个值(例如:360)。
进阶选项 驱动器速度单位与每秒计数比例:将驱动器的单位转换率设定为轴使用的计数(脉冲)单位,若此值为一,则代表轴使用每秒计数。 反转扭矩方向:反转扭矩方向。 储存与还原此栏位仅在「连线设定」页面的在「轴设定」下勾选「储存和还原位置偏移」选项时才会显示。您可将「储存和还原位置偏移」功能套用到每一个轴。关于「储存和还原位置偏移」功能的设定方式,请参阅〈使用储存和还原位置偏移功能〉。 储存和还原位置偏移:选取此选项可将「储存和还原位置偏移」功能套用至此轴。此选项预设为未选取,只有被勾选的轴,其位置偏移量才能在启用此功能时被储存或还原。 当 EtherCAT 中断连线时,已储存的偏移量会显示在「储存用于还原的偏移量」栏位。您可在必要时修改此偏移量。此处所修改的偏移量仅会写入专案,不会写入「位置偏移量档案」。 移动测试轴对编码器设定中的新设定值是否适用。 控制模式:在执行时设定轴的控制模式,此控制模式必须与目前存取模式相容,非所有轴都支援在运作时更改控制模式。
开始:开始执行。 |

安全设定极限开关以控制轴可移动的距离。
负极限负软体极限:设定轴可到达的最远负方向位置。 启用负极限开关:启用负软体极限。
正极限正软体极限:设定轴可到达的最远正方向位置。 启用正极限开关:启用正软体极限。
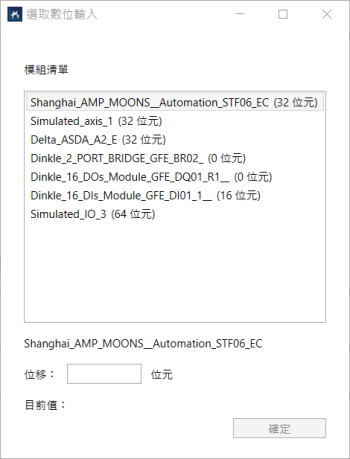
选取数位输入视窗 点击正/负极限中数位输入的「编辑」按键后即出现「选取数位输入」视窗。I/O 模组的长度为「预期长度」,详细资讯请见 IO 页面。
模组清单:可用的 I/O 模组清单。 位移:指定位元位移位置以读取该位置的值。 目前值:从模组读取的目前值。 |

原点回归设定轴的原点回归开关。
设定反转 开/关:反转感测器值,未勾选表示当感测器在高位(开)则被视为有触动;勾选表示当感测器在低位(关)视为有触动。 数位输入:
驱动器回归方法:使用伺服驱动器的原点回归功能。更多关于伺服驱动器的原点回归方法,请参照其使用说明书。 驱动器回归偏移量:轴找到原点感测器后移动的距离。 |

运动
设定轴的运动参数。

加速度单位:设定轴的加速度与加加速度单位。
每秒单位数:加速度使用单位为每秒2,加加速度使用单位为每秒3。
延迟秒数:加速度之延迟时间(单位为秒),此设定用来决定当增加速度并从零加速到最大速度时插补所需的时间。
设定工具中所有的运动参数皆受单位转换(回馈设定区域)与加速度单位 (设定 > 运动) 影响。更多关于加速度单位的运作方式请见:概念解说 > 运动曲线类型。
| 单位/秒 | 延迟(秒) | |
|---|---|---|
| 单位转换 (开) |
目标/距离:使用者单位 速度:使用者单位/秒 加速度:使用者单位/秒2 减速度:使用者单位/秒2 加加速度:使用者单位/秒3 加加加速度:使用者单位/秒4 |
目标/距离:使用者单位 速度:使用者单位/秒 加速度:秒 减速度:秒 加加速度:秒 加加加速度:秒 |
| 单位转换 (关) |
目标/距离:计数 速度:计数/秒 加速度:计数/秒2 减速度:计数/秒2 加加速度:计数/秒3 加加加速度:计数/秒4 |
目标/距离:计数 速度:计数/秒 加速度:秒 减速度:秒 加加速度:秒 加加加速度:秒 |
系统(安全与硬体)
将运动参数设定至轴,若伺服驱动器或马达有安全性功能或限制,请将相关设定套用于此。
最高速度:轴的最大速度,设为零则没有最大值的限制;设为其他值则最大速度将为所设定的值。
最低速度:轴的最小速度,设为零则没有最小值的限制;设为其他值则最小速度将为所设定的值。
最大扭矩:轴的最大扭矩,设为零则没有最大值的限制;设为其他值则最大扭矩将为所设定的值。
最小扭矩:轴的最小扭矩,设为零则没有最小值的限制;设为其他值则最小扭矩将为所设定的值。
最高加速度:轴的最大加速度。
最高减速度:轴的最大减速度。
最高加加速度:轴的最大加加速度。
最高加加加速度:轴的最大加加加速度(加速度的变化)。
最大追踪误差:轴的最大追踪误差。
目标位置误差:轴的位置错误,若目标位置与实际位置间的距离较此值小,则轴将被视为在目标位置而运动将停止。
应用程式
将参数设定至 KINGSTAR 应用程式
最高速度:最大速度,设为零则没有最大值的限制;设为其他值则最大速度将为所设定的值。
重要:当更改加速度单位时,因每个运动曲线类型拥有自己的的单位,因此以下栏位的值亦会更改。
最高加速度:最大加速度,设为零则没有最大值的限制;设为其他值则最大加速度将为所设定的值。
最高减速度:最大减速度,设为零则没有最大值的限制;设为其他值则最大减速度将为所设定的值。
最高加加速度:最大加加速度。设为零则没有最大值的限制;设为其他值则最大加加速度将为所设定的值。
最高加加加速度:最大加加加速度(加速度的变化),设为零则没有最大值的限制;设为其他值则最大加加加速度将为所设定的值。
参见